■ Características del Motor de Inducción
1, Generalmente, el Micro Motor de Inducción se refiere al motor girado por la inducción. El Motor de Inducción depende del condensador eléctrico y la electromagnética al arrancar y girar. Aunque su par motor de arranque no es muy alto, tiene una estructura simple, alta eficiencia y puede continuar girando.
2, El motor monofásico tiene una dirección inversa con la rotación cuando se opera. Cambie la dirección de rotación del motor monofásico solo después de detener el motor, por favor.
3, El motor trifásico depende de un suministro trifásico. Tiene una alta eficiencia y puede obtener un par motor de arranque elevado.
■ Características del Motor Reversible
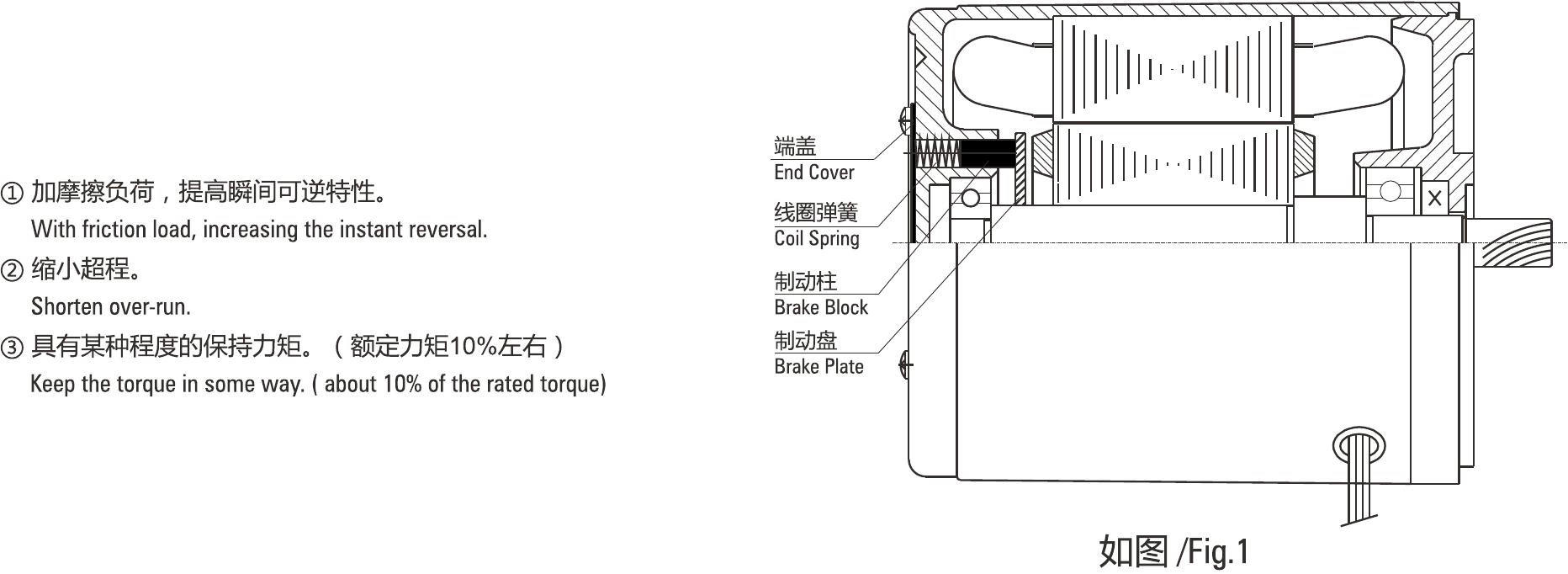
1, El motor reversible tiene un freno de fricción en la parte posterior del cuerpo del motor, que está diseñado para aplicaciones donde se requiere con frecuencia la inversión de dirección. Para el freno de fricción, consulte la Figura 1, por favor. El amortiguamiento con resorte impacta el disco de freno giratorio y se alimenta con prensa continua. Las funciones del freno de fricción son las siguientes:
2, El par de mantenimiento o más del freno de fricción y la sobrecarrera se enumeran en la tabla 1. Se facilita únicamente con fines de referencia. Ya que cambiará según el período de rotación y la temperatura. También tenga en cuenta, por favor, que el par motor puede ser un poco más bajo que el que se indica en la tabla cuando se opera inicialmente.
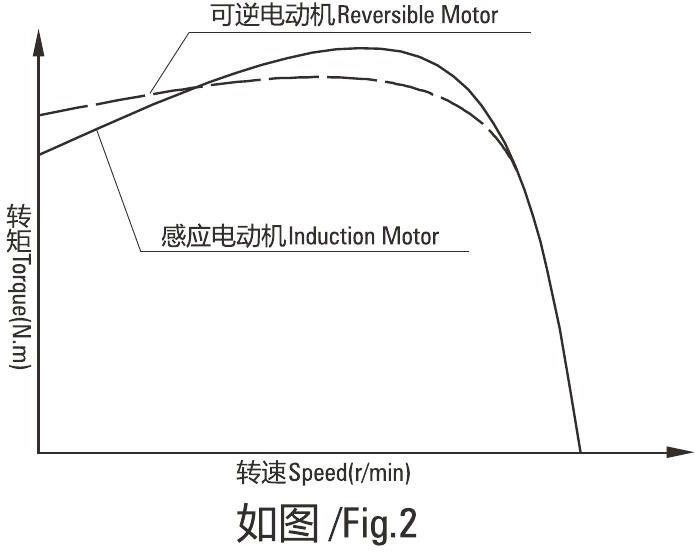
3, El Motor Reversible, como el Motor de Inducción, es arrancado por el condensador eléctrico y tiene la misma característica de par motor que el Motor de Inducción. Pero el Motor Reversible está diseñado con un par motor de arranque más alto para aumentar las características de reversión instantánea. Consulte la Figura 2, por favor.
■ Tabla 1. Mantenga el par y la sobrecarrera
|
Fase
|
Talla
|
Salida
|
Modelo del motor
|
Mantener el par
|
Sobrecarrera
|
|
mm
|
W
|
N.cm
|
Kgf.cm
|
Ciclos
|
|
Monofásico
|
60
|
6
|
2RK6
|
0.5
|
0.05
|
4
|
|
70
|
15
|
3RK15
|
1.3
|
0.13
|
5
|
|
80
|
25
|
4RK25
|
1.5
|
0.14
|
5
|
|
90
|
40
|
5RK40
|
4.0
|
0.40
|
6
|
|
60
|
5RK60
|
|
90
|
5RK90
|
|
120
|
5RK120
|
■ Características del Motor de Freno Electromagnético de Tipo Activado por Apagado
1, Estructura y principio de funcionamiento
La Tabla 3 es la estructura del Motor de Freno Electromagnético. Producimos el Tipo Activado por Apagado. Al ejercer el voltaje en la bobinado, magnetizará la armadura presionada por el resorte. El motor estará en una etapa de rotación, cuando haya un intervalo entre el inductor y la llanta del freno. Una vez que se reduce el voltaje del bobinado, bajo la influencia del resorte, la armadura presiona el borde del freno, lo que creará una fuerza de freno. Entonces el motor se detiene.
2, Las Características del Freno Electromagnético
Es un Freno Electromagnético de Tipo Activado por Apagado de CA que se conecta directamente con el motor. Se detendrá parpadeando y mantendrá la carga cuando el suministro esté apagado. Mantendrá el par entre 0.05-2.0Nmo. Es especialmente adecuado para el freno de seguridad en caso de apagado inconsciente. El electromagnético se puede cambiar la dirección con frecuencia. Se puede detener 6 veces en un minuto. Pero asegúrese de que dure 3 segundos o más.
Después de establecer un bucle de conmutación en el freno, puede compartir la fuente de alimentación con el motor.
※ El valor es estándar. Se cambiará en diferentes condiciones. Cuando se utilice realmente, asegúrese de que la temperatura de la superficie del motor sea inferior a 90 ° C.
3, Las Características para la Hora de Arranque y la Hora de Frenado
El tiempo de arranque significa el tiempo para el tiempo de arranque del motor más el tiempo de la liberación del freno electromagnético. El tiempo de frenado significa el tiempo desde el corte de energía hasta el momento en que el motor se detiene por completo. La sobrecarrera, el tiempo de arranque y el tiempo de frenado serán diferentes según las diferentes aplicaciones.
■ Tabla 2. Freno Electromagnético (Tipo Activado por Apagado)
|
Fase
|
Tamaño de salida
|
Voltaje V
|
Frecuencia Hz
|
Corriente A
|
Entrada W
|
Mantener el par
|
Sobrecarrera
|
|
MM
|
W
|
N.cm
|
Kgf.cm
|
Ciclos
|
|
Monofásico
|
70
|
15
|
110
120
220
230
|
50/60
|
0.091
|
8.2
|
0.5
|
50
|
3.5
|
|
80
|
25
|
|
90
|
40
|
|
60
|
|
0.111
|
10.0
|
1.0
|
100
|
|
90
|
|
120
|
|
100
|
120
|
|
140
|
|
200
|
0.144
|
13.0
|
2.0
|
200
|
|
Trifásico
|
60
|
6
|
220 ~ 230
|
50/60
|
0.073
|
6.6
|
0.25
|
25
|
|
70
|
15
|
380 ~ 415
|
0.037
|
6.6
|
0.25
|
25
|
|
80
|
25
|
200 ~ 230 380 ~ 415
|
0.091
|
8.2
|
0.5
|
50
|
|
90
|
40
|
|
60
|
0.046
|
8.2
|
0.5
|
50
|
|
90
|
200 ~ 230 380 ~ 415
|
0.111
|
10.0
|
1.0
|
100
|
|
120
|
|
100
|
120
|
0.056
|
10.0
|
1.0
|
100
|
|
140
|
|
200
|
200 ~ 230 380 ~ 415
|
0.144
|
13.0
|
2.0
|
200
|
|
0.144
|
13.0
|
2.0
|
200
|

■ Las Características del Motor de Control de Velocidad
1, Es una unidad del controlador y del motor. Solo necesita conectarse una vez. La velocidad se puede ajustar fácilmente mediante el potenciómetro. El controlador es fijo con bucle de control de velocidad, condensador eléctrico, promulgación de velocidad, etc. No hay función de parada instantánea en la unidad.
2, El controlador puede hacer que la velocidad sea variable entre 90-1350 rpm a 50 Hz y 90-1650 rpm a 60 Hz.
3, No haga funcionar el motor a baja velocidad durante mucho tiempo para evitar el sobrecalentamiento, por favor.
 ES
ES