ES
ES

Atención:
Preste atención a las siguientes precauciones acerca de la instalación, el cableado, el funcionamiento, el mantenimiento y la inspección para evitar daños a las personas y a la propiedad causados por el mal uso.
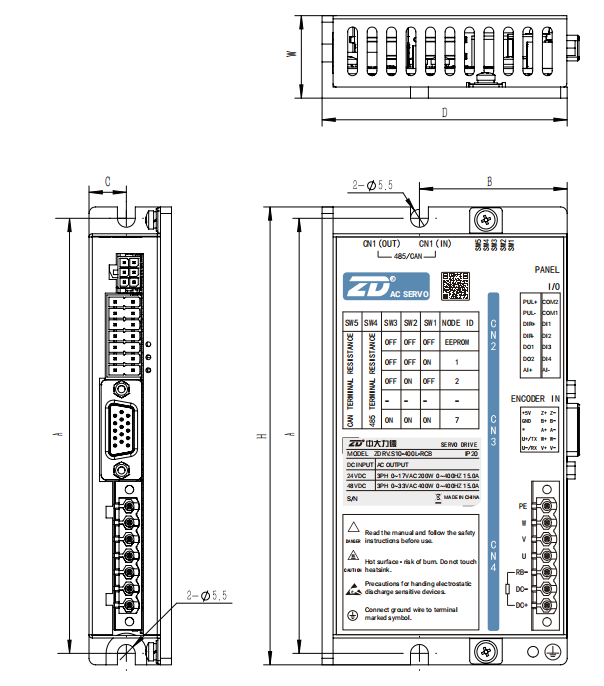
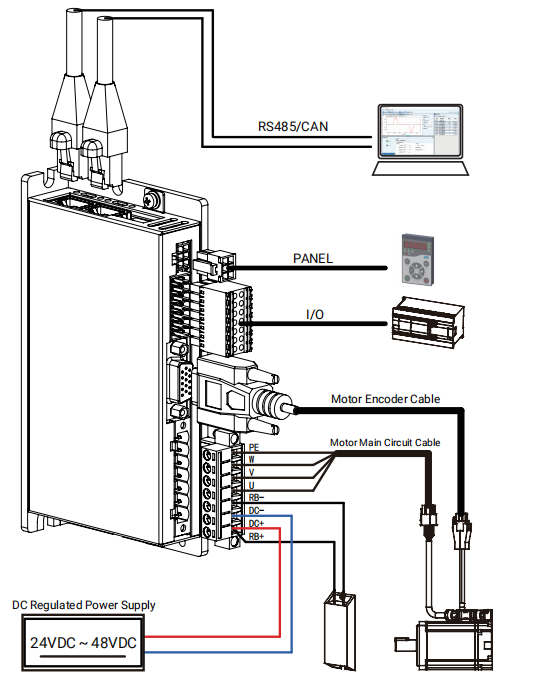
1】Conecte el cable a tierra al terminal con la marca de conexión a tierra para asegurarse de que el servosistema esté firmemente conectado a tierra;
2】 No reemplace el motor, el cable ni toque los terminales de cableado dentro de los 5 minutos posteriores a apagar la alimentación, de lo contrario, existe el riesgo de descarga eléctrica;
3】No toque el disipador de calor, el motor y la resistencia de frenado durante el funcionamiento para evitar quemaduras;
4】 Configure el dispositivo de protección contra sobrecorriente, el disyuntor de corriente residual y el dispositivo de parada de emergencia, y confirme su efectividad antes de la operación;
5】 Configure un circuito de parada de emergencia externo para garantizar que la operación se pueda detener a tiempo y que la fuente de alimentación se pueda cortar en caso de emergencia;
6】Por favor, primero haga funcionar el servomotor sin carga para evitar accidentes antes de la prueba;
7】Por favor, no encienda/apague el servocontrolador con frecuencia;
8】Está estrictamente prohibido realizar la instalación, el cableado y otras operaciones en condiciones de encendido;
9】No conecte el terminal del cable del motor al suministro principal;
10】No desmonte, modifique ni repare el controlador del servomotor usted mismo;
11】Apague la fuente de alimentación del controlador cuando se produzca un error;
12】La alimentación debe estar apagada si no se utiliza durante mucho tiempo.
Entorno de almacenamiento:
Este producto debe colocarse en la caja de embalaje antes de la instalación. Si no se usa temporalmente, preste atención a los siguientes elementos al almacenar
para que el producto cumpla con el alcance de protección y mantenimiento futuro de nuestra empresa:
para que el producto cumpla con el alcance de protección y mantenimiento futuro de nuestra empresa:
● La temperatura ambiente del lugar de almacenamiento debe estar dentro del rango de -20 °C a 80 °C;
● La humedad relativa del lugar de almacenamiento debe estar dentro del rango de 0 % a 90 % sin condensación;
● Evite el almacenamiento en un entorno que contenga gases o líquidos corrosivos.
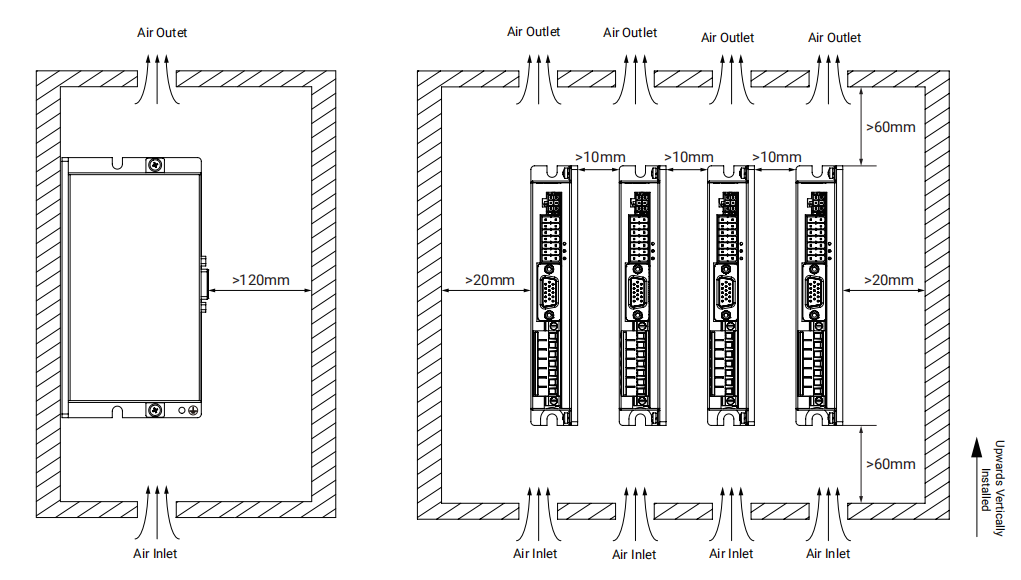
Entorno de instalación:
● La temperatura ambiente de trabajo de la unidad servo: 0~45 ℃;
● Humedad: por debajo del 90 % de HR (humedad relativa);
● Vibración: 4,9 m/s², altitud aplicable: inferior a 1000 m, se necesita una potencia menor si es superior a 1000 m;
● Para evitar la congelación o la condensación
● Úselo a una temperatura ambiental inferior a 45 °C para garantizar la confiabilidad del uso a largo plazo.
● La temperatura ambiente de trabajo de la unidad servo: 0~45 ℃;
● Humedad: por debajo del 90 % de HR (humedad relativa);
● Vibración: 4,9 m/s², altitud aplicable: inferior a 1000 m, se necesita una potencia menor si es superior a 1000 m;
● Para evitar la congelación o la condensación
● Úselo a una temperatura ambiental inferior a 45 °C para garantizar la confiabilidad del uso a largo plazo.

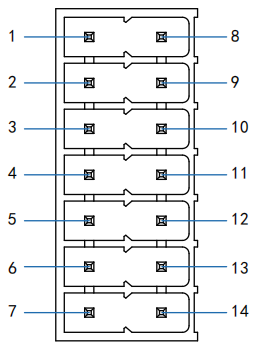
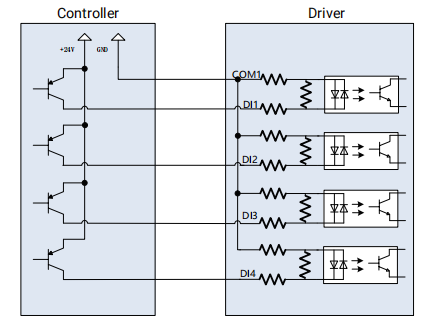
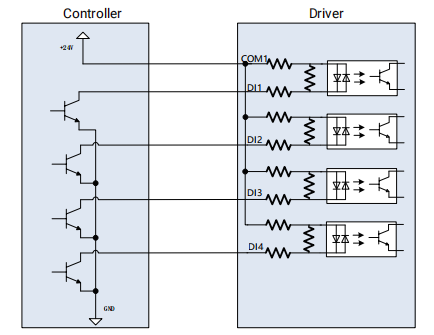
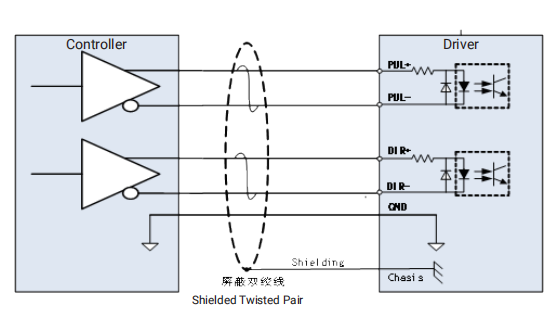
 Nota: si se conecta una señal de pulso de 24 V, se debe conectar una resistencia de 2 K a la línea de señal de pulso y la potencia debe ser superior a 0,5 W.
Nota: si se conecta una señal de pulso de 24 V, se debe conectar una resistencia de 2 K a la línea de señal de pulso y la potencia debe ser superior a 0,5 W.