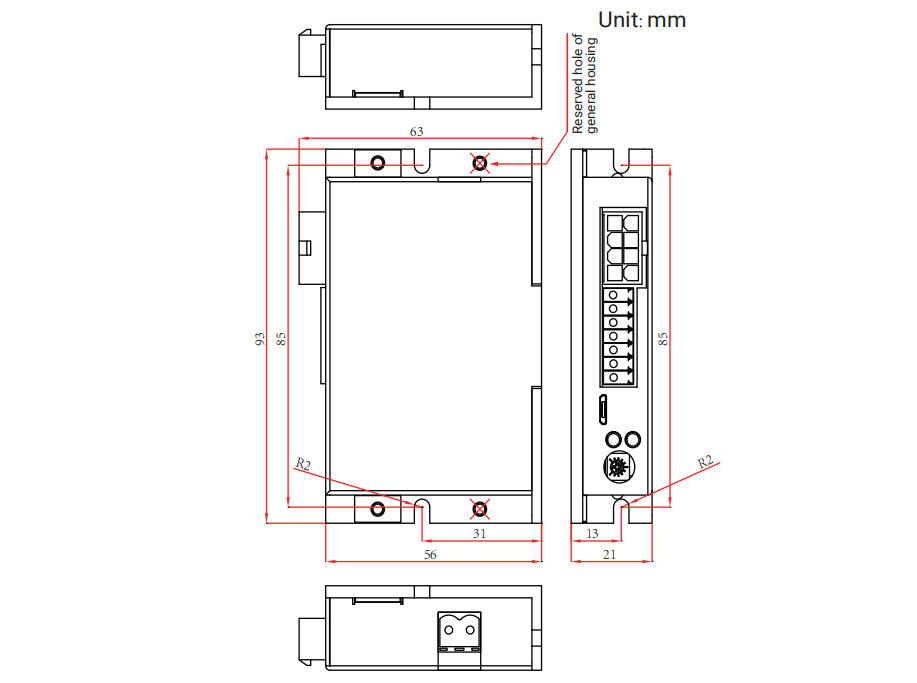
● Compacto: adecuado para espacios limitados: 93 mm * 56 mm * 21 mm
● Voltaje y corriente: voltaje de entrada 24 V ~ 48 V (± 20%), corriente de salida 7 A (ajustable mediante teclado)
● Modo de funcionamiento: bucle abierto, bucle cerrado (precisión de control ± 0,5%)
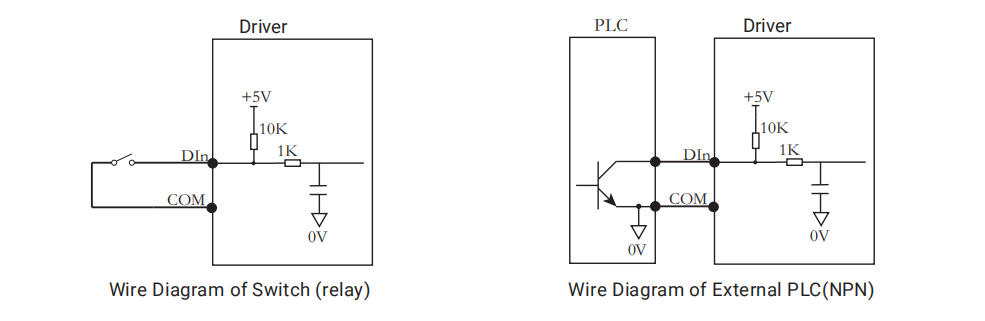
● Configuración de comandos: control de terminal de entrada multifunción (entrada NPN) Control de teclado externo
● Configuración de velocidad: perilla incorporada, voltaje analógico externo o PWM (0 ~ 5V / 10V), configuración del teclado
● Control de aceleración / desaceleración: 0.3s ~ 10s Ajustable por teclado
● Freno electrónico: frenado electromagnético rápido
● Interfaz de entrada multifunción: 3 entradas digitales (NPN / PNP), configuración a través del teclado: rotación hacia adelante, rotación hacia atrás, parada libre, freno electrónico, velocidad de múltiples etapas, etc.
● Interfaz de salida multifunción: 1 salida digital (salida de colector abierto), configuración a través del teclado: funcionamiento, error, salida de velocidad, advertencia de sobrecarga, etc.
● Indicación y protección de fallas: muestra la información de error por LED o teclado después de la protección para la indicación de error, como: bajo voltaje, sobrevoltaje, sobrecorriente, sobrecarga, rotor bloqueado, falta de fase, sobrecalentamiento, etc.
* El control del teclado, la entrada multifunción y la salida multifunción se pueden realizar con un teclado externo.
 ES
ES

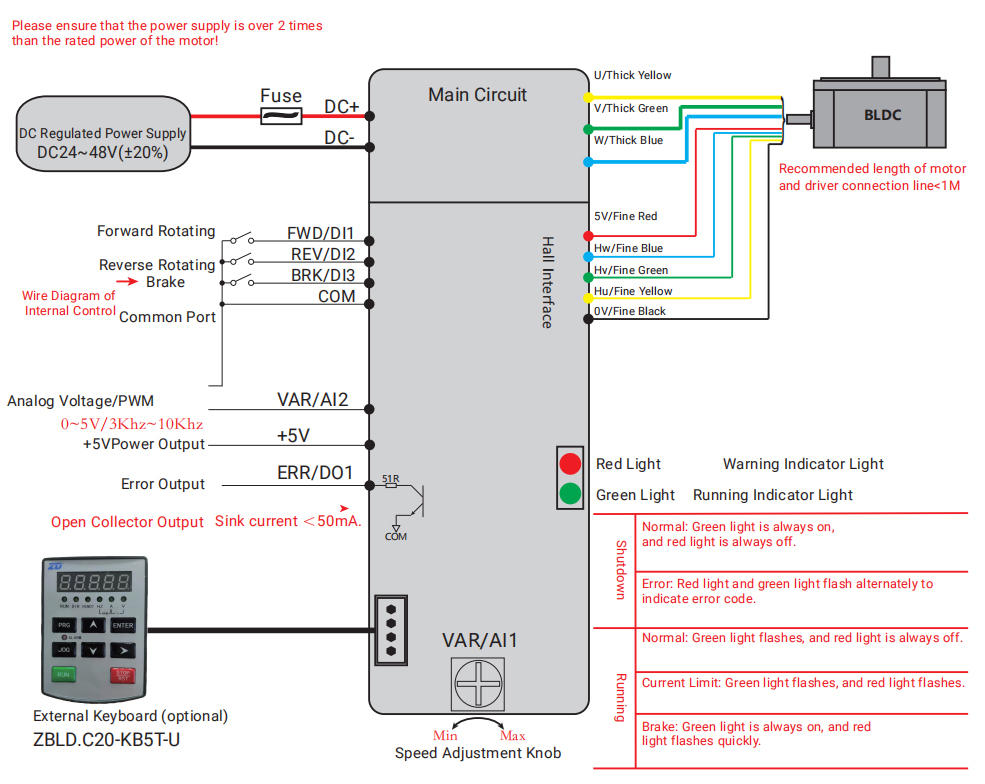
 La luz verde parpadea una vez por 5
La luz verde parpadea una vez por 5  La luz roja parpadea una vez por 1 Código de error = Tiempos de parpadeo de la luz verde * 5 Tiempos de parpadeo de la luz roja
La luz roja parpadea una vez por 1 Código de error = Tiempos de parpadeo de la luz verde * 5 Tiempos de parpadeo de la luz roja










