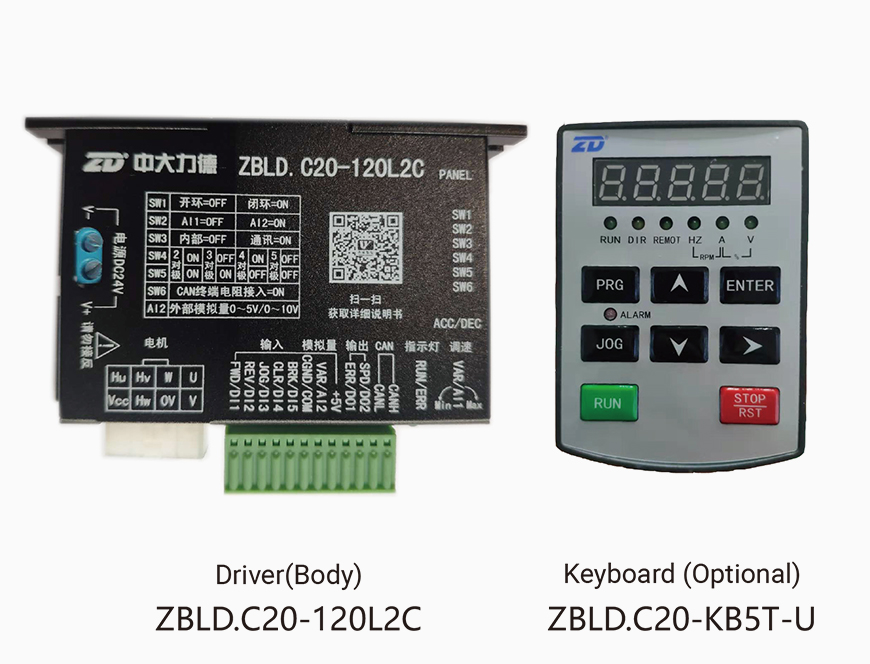
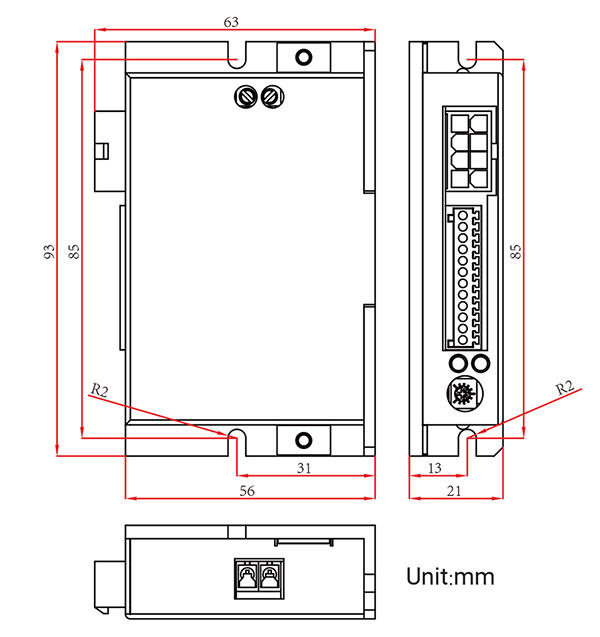
● Compacto: adecuado para espacios limitados: 93 mm * 50 mm * 21 mm
● Voltaje y corriente: voltaje de entrada 24 V (± 20%), corriente de salida 7.5 A (ajustable mediante teclado)
● Modo de funcionamiento: bucle abierto, bucle cerrado (precisión de control ± 0,5%)
● Configuración de comandos: control de terminal de entrada multifunción (entrada NPN) CAN Modbus, control de comunicación abierta CAN Control de teclado externo
● Configuración de velocidad: perilla incorporada, voltaje analógico externo o PWM (0 ~ 5V / 10V), configuración de frecuencia 0 ~ 20KHZ, configuración de comunicación, configuración de teclado, control de velocidad de múltiples etapas, control PLC simplificado
● Control de aceleración / desaceleración:
0.3s ~ 10s Ajustable por perilla, comunicación y teclado
● Freno electrónico: frenado electromagnético rápido
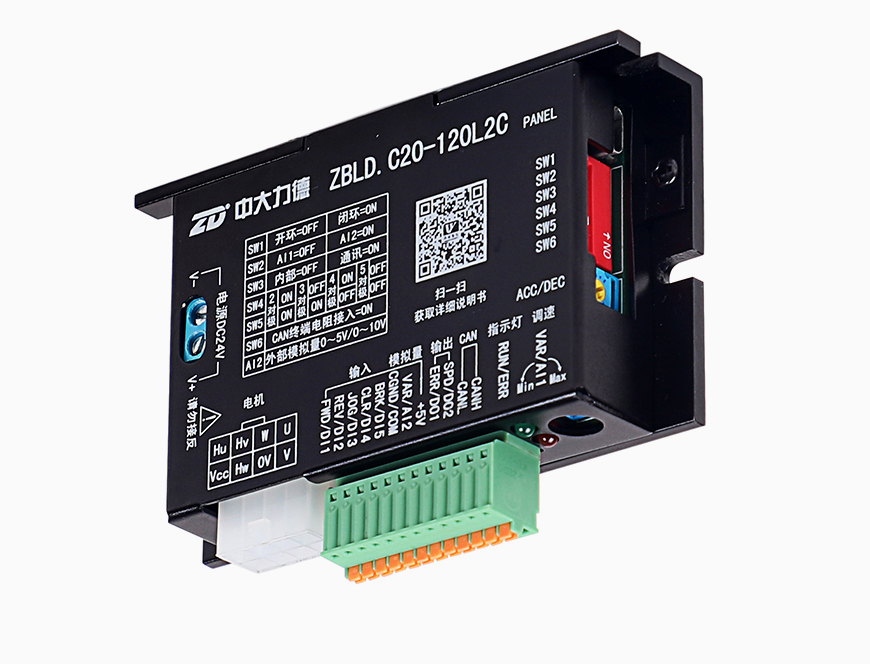
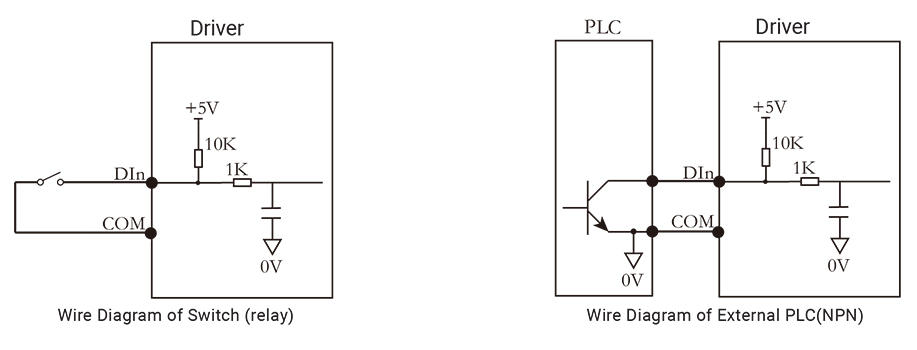
● Interfaz de entrada multifunción:
5 entradas digitales (NPN), ajuste a través del teclado: rotación hacia adelante, rotación hacia atrás, avance lento, parada libre, freno electrónico, velocidad multietapa, etc.
● Interfaz de salida multifunción:
2 salidas digitales (salida de colector abierto), configuración mediante teclado: funcionamiento, error, salida de velocidad, advertencia de sobrecarga, salida de terminal virtual, etc.
● Indicación y protección de fallas:
Muestre la información de error por LED o teclado después de la protección para la indicación de error, como: bajo voltaje, sobrevoltaje, sobrecorriente, sobrecarga, rotor bloqueado, cortocircuito, falta de fase, sobrecalentamiento, etc.
* Control de teclado, entrada multifunción, salida multifunción, control de velocidad de múltiples etapas, control PLC simplificado que se puede realizar con un teclado externo.
 ES
ES



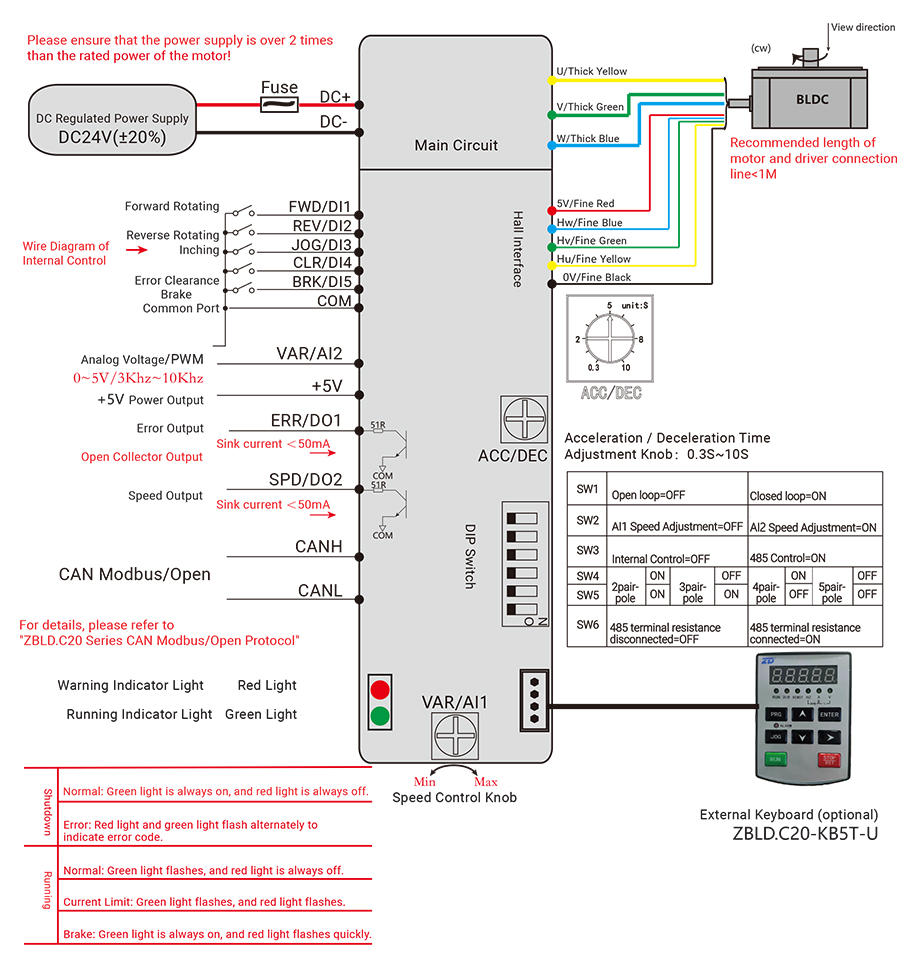
 La luz verde parpadea una vez por 5
La luz verde parpadea una vez por 5  La luz roja parpadea una vez por 1 Código de error = Tiempos de parpadeo de la luz verde * 5 Tiempos de parpadeo de la luz roja
La luz roja parpadea una vez por 1 Código de error = Tiempos de parpadeo de la luz verde * 5 Tiempos de parpadeo de la luz roja










